���ùȸ�3D�����c��ģ�͵��㷨�У��҂������˺ϳ��c���@һ�K���@�������f�f�ϳ��c�Ƶķ����ɡ�
�ϳ��c��
����Google Street View API�ṩ�IJ�ͬ��ַ�g��朽ӣ��҂��õ�������ȫ���DƬ�Ę��R�c�͵�����Ϣ��
���ԣ��҂��F�ڿ������µĵ��c�����؏�֮ǰ�IJ��E����ȫ���DƬ����3D�������܉��S����ǰ�҂��Â��c�����Ĉ����������ؽ�һ���挍����Ĉ�����
�҂��@���Ŀ���f����ʹ�Ãɂ����ޣ��ɂ�ȫ���DƬ�g����̾��x�Լ������Ϣ���؏͡�
���Ԍ���һ���d���ȫ���DƬ�����һ�����ĸ�����Ȼ����һ�N�V�ȃ��ȵķ�ʽ(breadth-first)�M��̽����
ƽ�����f���҂�ע��ȸ����ȵ؈Dͨ�������F�������200-300�ľ��x�������҂��Q����1��1�ı������ؽ�������
�҂�����һ���c�Ƶ����������O��(0��0��0)��Ȼ���҂������挍���絽ȫ��λ�õľ��x������offset proportional�����������Ĕ�����
����һЩ�κͽ���ֵ���҂��������@��һ���㷨��Ӌ��[x��z]ƽ���distance vector��
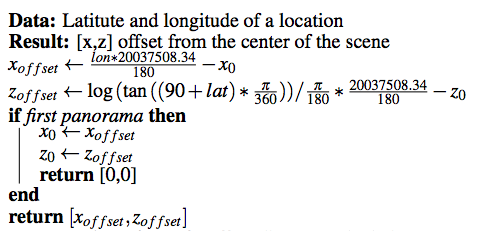
�����@���D�����@���c����Ҫ�����Ĺȸ�־�����ȡ��Heading�ض���Ϣ��������ֱY�S�����D��Ȼ��ŵõ���һ����������D��Ч����
��x���ĵ���߀��x��...
�W���uՓ
���T����
 δ��VR���翴�����@ô����
δ��VR���翴�����@ô���� �����\��AR���g����������
�����\��AR���g���������� Tvori�w����ʽ�Ͼ� VR�Ӯ���������
Tvori�w����ʽ�Ͼ� VR�Ӯ��������� VR����ô���_�҂��Ĵ��X��
VR����ô���_�҂��Ĵ��X����������
 �ȸ�־���������3D�����c��ģ���㷨�u��
�ȸ�־���������3D�����c��ģ���㷨�u�� �ȸ�3D�����c��ģ�ͺϳ��c�Ʒ���
�ȸ�3D�����c��ģ�ͺϳ��c�Ʒ�����������
- VR�O����ص��ռ�߀��Ҫһ��ڴ�����GO
- AR�Α����m�ϴ���RPG��͵�ԭ��
- Lucid VR:���܉����[ȫ������У
- ���خa�_�lVR���g ��������ͨ�^̓�M�F������
- WebVR 1.0��ʽ֧�ֻ���g�[�� �W�VR�r������
- Htc Viveُ�Iǰ�㑪ԓҪ�˽�������
- Htc Vive������Ҫ���ķ��� htc vive��Ҫ�����g
- Htc Vive��λ���� htcvive��λ��δͬ����Q����
- PlaystationVR�����Ҫ�_������ƽ�Ŀ��g
- Htc Vive�ֱ�ʹ�ü��S�o����


 �湫�W���� 43011102000836̖
�湫�W���� 43011102000836̖